Niezastąpione bezzałogowce
30 Lipca 2021Jakie są dziś możliwości wykorzystania technologii bezzałogowych w działaniach antyterrorystycznych? Warto przyjrzeć się rozwiązaniom z zakresu robotyki oraz ich proponowanemu zastosowaniu w akcjach prowadzonych przez jednostki ratownicze ze wsparciem oddziałów kontrterrorystycznych. Dzięki badaniom przeprowadzonym przez SGSP i WAT możemy przekonać się, jak wygląda to w praktyce.

Różne scenariusze skomplikowanych łączonych akcji gaśniczych, ratowniczych i kontrterrorystycznych zrealizowane na poligonie WAT pokazały możliwości dwóch systemów bezzałogowych: robotów lądowych (UGV - unmanned ground vehicle) i platform latających. Była to nowość przez nas zaproponowana. W artykule śledzimy także kierunki rozwoju systemów bezzałogowych, których użycie może w najbliższej przyszłości zwiększyć bezpieczeństwo akcji służb zwalczających terroryzm i terror kryminalny.
Opis eksperymentu
Badania poligonowe przeprowadzone zostały jako projekt uzupełniający wobec rozwiązań stosowanych lub badanych na świecie, ponieważ żadna z dostępnych publikacji nie obejmowała problematyki połączenia możliwości robotów UVG, UAV oraz systemów gaśniczych opartych na mgle wodnej. Założenia eksperymentu oraz sposób jego realizacji były efektem długotrwałych przygotowań i dyskusji w zespole. Dotyczyły one najbardziej reprezentatywnych scenariuszy oddających rzeczywistość operacyjną w działaniach gaśniczych bądź poszukiwawczo-ratowniczych, w tym poszukiwań poszkodowanych w warunkach stwarzających zagrożenie dla życia lub zdrowia ratowników.
Realizm scenariuszy starano się uzyskać przez takie przygotowanie miejsca eksperymentu, aby kierujący działaniem ratowniczym (oficer Państwowej Straży Pożarnej), do którego codziennych rutynowych zadań należy dowodzenie tego rodzaju akcjami, miał dostęp tylko do takich informacji, które otrzymałby w realnej sytuacji. Zapewniono łączność radiową, by odwzorować działanie całego systemu ratowniczego funkcjonującego podczas akcji ratowniczej. Dowodzący nie brał udziału w przygotowaniu scenariusza (określeniu punktów, do których miał dotrzeć) ani nie znał układu poligonu. Dysponował taką samą wiedzą, jaką miałby po dotarciu na miejsce akcji i musiał postępować zgodnie z obowiązującymi w KSRG procedurami. Wsparcia dowodzącemu udzielało na miejscu dwóch operatorów sprzętu bezzałogowego, kierowca pojazdu dowodzenia i łączności oraz - za pośrednictwem łączności radiowej - osoby, których zadaniem było symulowanie działań stanowisk kierowania i służb pomocniczych.
Podczas realizowania scenariuszy dokonywano rejestracji czasu dotarcia oraz skutecznego nakierowania lancy na cele pozorujące zarzewia ognia w nieznanej początkowo dowodzącemu liczbie. Konieczne było ich ustalenie tylko i wyłącznie za pomocą pojazdów bezzałogowych, ze względu na inne zagrożenia znajdujące się na obszarze działania (magazyn amunicji, niebezpieczeństwo ostrzału - obszar prowadzonych działań znajdował się pod kontrolą aktywnego strzelca).
W scenariuszu poszukiwawczo-ratowniczym celem była lokalizacja osoby poszkodowanej w środowisku silnie skażonym - ratownicy mogli wejść na ten teren tylko w ograniczonym czasie ze względu na krótki dopuszczalny czas ekspozycji na czynnik szkodliwy. Precyzyjna lokalizacja poszkodowanego przez systemy znajdujące się w bezzałogowcach miała maksymalnie zredukować czas ich przebywania w strefie czerwonej.
Warto poznać zrealizowane scenariusze w szczegółach.
Scenariusz 1
Pracownik ochrony obiektu podczas obchodu spostrzegł dym wydobywający się z części budynku, w której znajdował się magazyn broni i amunicji składowanej na potrzeby pobliskiej strzelnicy. Po przyjęciu zgłoszenia zadysponowany został samochód operacyjny z dowódcą i samochód ratowniczo-gaśniczy z obsadą, w celu dokonania rozpoznania sytuacji.
Do chwili ich przybycia na miejsce pożar rozwinął się na tyle, że bezpośrednio zagrażał składowi amunicji i podjęcie akcji gaśniczej było obarczone ryzykiem zranienia ratowników elementami eksplodujących pocisków. W związku z tym za pomocą czerwonej taśmy ostrzegawczej wyznaczono strefę zagrożenia, a na miejsce wezwano zespół z pojazdami bezzałogowymi.
Wariant 1a
Kierujący działaniem ratowniczym podjął decyzję o zadysponowaniu robota lądowego z lancą mgłową. Duże zadymienie znacznie utrudniało posłużenie się wyłącznie robotem lądowym wyposażonym w kamery światła widzialnego, ponieważ nie pozwalało dotrzeć precyzyjnie do źródła ognia. Taki wariant działania bardzo wydłużyłby czas prowadzenia akcji, opóźniając lokalizację pożaru i jego ugaszenie.
Wariant 1b
Kierujący działaniem ratowniczym podjął decyzję o zadysponowaniu robota lądowego wyposażonego w lancę mgłową ze wsparciem bezzałogowej platformy latającej. Użycie kamery termowizyjnej pozwoliło precyzyjnie określić miejsca charakteryzujące się najwyższą temperaturą i dokładnie nakierować lancę mgłową na źródło ognia. Efektywność działań zdecydowanie zatem wzrosła.
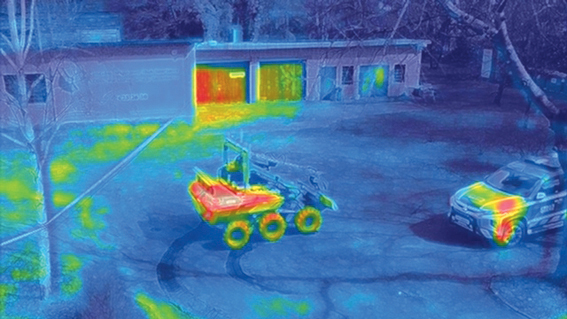
Scenariusz 1b - zastosowanie bezzałogowej platformy latającej i termowizji fot. Krzysztof Orzepowski
Scenariusz 2
Podczas spaceru na obrzeżu lasu grupa osób dostrzegła dym wydobywający się z kilku oddalonych od siebie miejsc. Chcąc sprawdzić przyczynę, zbliżyli się do jednego z nich i zauważyli płomienie. Przy próbie podejścia do zarzewi ognia zostali jednak ostrzelani przez niewidocznego mężczyznę, który przez megafon kazał się im oddalić.
Przechodnie powiadomili o zdarzeniu CPR. Ze względu na obecność uzbrojonego i niebezpiecznego osobnika do podjęcia akcji gaśniczej zadysponowano od razu zespół bezzałogowy oraz wezwano jednostkę antyterrorystyczną. Moduł bezzałogowy dotarł na miejsce pierwszy. Z informacji podanych przez stanowisko kierowania wynikało, że czas oczekiwania na jednostkę AT wyniesie jeszcze pół godziny, ponieważ jest ona zaangażowana w inną operację. Podjęto decyzję o rozpoczęciu akcji gaśniczej z zachowaniem wszelkich środków ostrożności, aby nie narażać się na ostrzał. Pełna liczba zarzewi ognia nie była znana (wiadomo tylko, że jest więcej niż jedno).
Wariant 2a
Kierujący działaniem ratowniczym zadysponował lądowy pojazd bezzałogowy w celu identyfikacji liczby miejsc objętych pożarem oraz podjęcia akcji gaśniczej. Udało się zlokalizować dwa zarzewia ognia i skutecznie je ugasić, jednakże obserwatorzy donosili o jeszcze jednym miejscu, z którego wydobywa się dym. Operatorowi pojazdu lądowego nie udało się zlokalizować tego obszaru.

Scenariusz 2a - gaszenie pożaru przez lądowy pojazd bezzałogowy fot. Paweł Wolny
Wariant 2b
Kierujący działaniem ratowniczym zadysponował UAV w celu określenia położenia zarzewi ognia i na podstawie ich umiejscowienia, nakładając obraz z kamery światła widzialnego i termowizji na mapę terenu, opracował optymalną trasę do wszystkich trzech miejsc objętych pożarem. Przeprowadzone działania operacyjne umożliwiły skuteczną akcję gaśniczą, a zastosowanie technologii Stealth w UAV zabezpieczyło urządzenie przed zidentyfikowaniem i zneutralizowaniem przez ukrytego w lesie agresora.
Scenariusz 3
Grzybiarze natrafili w zagajniku na składowisko amunicji z czasów II wojny światowej - znajdowało się w rozpadlinie, która pojawiła się po obfitych deszczach. O tym znalezisku powiadomili CPR, który zadysponował patrol saperski i jednostkę PSP. Podczas oględzin okazało się, że jest to amunicja wypełniona gazami bojowymi. Saper, dysponując jedynie wyposażeniem przeciwodłamkowym, wycofał się i założył odzież gazoszczelną. Podjął próbę zabezpieczenia materiałów wybuchowych do transportu, jednakże przerdzewiała skorupa pocisku pękła i nastąpiło uwolnienie toksycznej, gęstej chmury. Próbując gwałtownie wstać, saper poślizgnął się na grząskim terenie i upadł tak nieszczęśliwie, że uderzył głową o kamień, tracąc przytomność.
W związku zagrożeniem chemicznym na polecenie dowodzącego akcją zadysponowano moduł bezzałogowy, który znajdował się w mniejszej odległości niż najbliższa jednostka o specjalizacji z zakresu ratownictwa chemiczno-ekologicznego. Bezzałogowy pojazd lądowy miał za zadanie stworzyć kurtynę wodną ograniczającą rozprzestrzenianie się toksycznej chmury.
Wariant 3a
Próbę ewakuacji poszkodowanego miał podjąć drugi saper. Jego zadaniem było również zabezpieczenie amunicji. Miał jednak znaczne trudności z dotarciem do miejsca, gdzie stracił przytomność jego poprzednik, któremu na dodatek pozostał już niewielki zapas powietrza. Wszystko to powodowało, że przeprowadzenie akcji poszukiwawczej w gęstym dymie przez człowieka w ubraniu przeciwgazowym i przeciwodłamkowym było niemożliwe.
Wariant 3b
Dowodzący akcją ratowniczą podjął decyzję o użyciu systemu UAS wyposażonego w kamerę termowizyjną, aby do minimum skrócić czas lokalizacji poszkodowanego oraz wybrać odpowiednią trasę. Ważne było to, by ratownik w ciężkim ubraniu ochronnym mógł ją pokonać w jak najkrótszym czasie, dotrzeć do poszkodowanego i ewakuować go ze strefy bezpośredniego zagrożenia.
Słowo o sprzęcie
W eksperymencie wykorzystano następujące środki:
- samochód dowodzenia i łączności wyposażony w stanowiska operatorów systemów bezzałogowych oraz w sprzęt łączności,
- robot lądowy Florian,
- UAS DJI Mavic 2 Enterprise DUAL FLIR z kamerą termowizyjną.
Mavic 2 Enterprise Dual DJI należy do serii dronów DJI Enterprise. Ten model wyposażony jest w stabilizator obrazu (gimbal) z dwusensorową kamerą światła widzialnego 4K oraz termowizyjną.
System termowizyjny może działać samodzielnie lub jako wsparcie dla sensora światła widzialnego. Nałożenie widoku z kamery RGB i kamery termowizyjnej wyraźnie zwiększa szczegółowość obrazu. Te możliwości oraz system dokładnego pozycjonowania urządzenia wykorzystano w scenariuszu poszukiwawczo-ratowniczym (nr 3).
Mavic 2 Enterprise Dual DJI pozwala na wybranie obszaru, na którym określone zostaną temperatury skrajne. Typowym zastosowaniem tej funkcjonalności jest poszukiwanie osób - ich ciepło sprawia, że wyróżniają się czerwoną i żółtą barwą na niebiesko-czarnym tle chłodnego obszaru. W zależności od otoczenia i poszukiwanych obiektów izotermy pochodzące z kamery mogą być regulowane ręcznie lub ustawiane na podstawie określonych wartości, by odpowiadały one realnym zadaniom.
Aby urządzenie mogło przemieszczać się niezauważone, stworzono funkcję Stealth. Po jej uruchomieniu wszystkie światła Mavic 2 Enterprise Dual DJI zostają wyłączone. Dodatkowo operator może wybrać sposób kontroli urządzenia, dzięki któremu będzie ono generowało minimalny hałas.
Wnioski z badań
Użycie systemów bezzałogowych umożliwia podjęcie działań ratowniczych na obszarach wysokiego zagrożenia życia i zdrowia ludzi różnymi rodzajami czynników niebezpiecznych (eksplodująca amunicja, ostrzał bądź uwolnienie toksycznych gazów). Zasięg działania urządzeń bezzałogowych gwarantuje operatorom i dowodzącemu akcją pełne bezpieczeństwo i komfort prowadzenia działań (samochód dowodzenia i łączności z klimatyzowaną kabiną chroni przez niekorzystnymi czynnikami zewnętrznymi).
Wykorzystanie samej platformy lądowej okazało się o tyle utrudnione, że aktualnie stosowane systemy obserwacyjne, którymi dysponuje operator, są niewystarczające w warunkach prowadzonych eksperymentów. Nawet doposażenie w dodatkowe kamery, w tym termowizyjne, łącznie z kamerami obrotowymi, nie da oglądu sytuacji operacyjnej zapewnianej przez systemy latające. Są one odpowiednio wyposażone i dzięki temu umożliwiają przygotowanie w bardzo krótkim czasie szczegółowej mapy terenu wraz z drogami dojazdowymi uwzględniającymi rozmiary, masę i inne parametry, takie jak np. maksymalne nachylenie podjazdu dostępne dla robota lądowego.
Podczas eksperymentów w niektórych sytuacjach napęd kołowy nie zdawał egzaminu; w trudnym, grząskim terenie zdecydowanie lepiej sprawdzi się napęd gąsienicowy.
Dwa systemy, które wymagają udziału dwóch operatorów, to tylko pozornie utrudnienie w organizacji modułów bezzałogowych. Po pierwsze, jak już wspomniano, wyposażenie w systemy wizyjne pojazdu lądowego nie jest w stanie dać pełnego obrazu sytuacji, który oferuje system latający, a dodatkowo jego wyposażenie we wszystkie niezbędne czujniki i kamery będzie zdecydowanie droższe niż seryjny UAV wysokiej klasy, w zupełności wystarczający do prowadzenia rozpoznania oraz przesyłu danych do centrum dowodzenia na wymaganym poziomie. Samo pozyskanie operatora systemów latających w formacjach mundurowych przestało już jakiś czas temu stanowić problem ze względu na stale zwiększającą się liczebność funkcjonariuszy mających niezbędne uprawnienia VLOS.
W rozwoju opisanej technologii i jej użyteczności dla formacji strzegących bezpieczeństwa pomogłoby:
- utworzenie sformalizowanych zespołów bezzałogowych działających w stałych składach, wspólnie ćwiczących i biorących udział w rzeczywistych akcjach - poprawiające efektywność ich wykorzystania,
- przeszkolenie operatorów UAV służących w modułach bezzałogowych do lotów BVLOS - zwiększające bezpieczeństwo działań z użyciem aparatów latających,
- zainstalowanie większego zbiornika niż zastosowany w eksperymencie - mimo że zastosowanie lancy mgłowej przyniosło spodziewane efekty i udało się osiągnąć zamiary operacyjne, jest to konieczne przy realizacji kilku zadań lub działań wymagających długotrwałego podawania wody, np. instalacji kurtyny wodnej do ograniczania dyspersji gazów.
Użyteczność systemów bezzałogowych, zarówno powietrznych, jak i lądowych, jest bezdyskusyjna, a dowodzą tego liczne projekty prowadzone przez różne ośrodki badawcze, również finansowane z budżetu centralnego sił zbrojnych czy służb specjalnych. Są one realizowane nie dla samego rozwoju nauki, ale w celu szybkiej komercjalizacji, rozumianej jako wdrożenie do celów służbowych.
[Zdjęcie obok lead - Scenariusz 3a - robot lądowy Florian i dron działają w gęstym zadymieniu fot. Paweł Wolny]
Badania zrealizowano dzięki współpracy z zespołem z Instytutu Robotów i Konstrukcji Maszyn WAT pod kierownictwem dr. hab. inż. Andrzeja Typiaka, profesora uczelni
bryg. dr inż. Norbert Tuśnio jest adiunktem w Katedrze Działań Ratowniczych na Wydziale Inżynierii Bezpieczeństwa i Ochrony Ludności SGSP
dr inż. Paweł Wolny - adiunktem badawczo-dydaktycznym na Wydziale Inżynierii Procesowej i Ochrony Środowiska Politechniki Łódzkiej
mjr mgr inż. Janusz Jabłoński - nauczycielem akademickim na Wydziale Inżynierii Mechanicznej WAT